
I am passionate about applying my expertise in electrical engineering and my strong research background to advance innovation in autonomous systems and emerging technologies. I earned my master's degree in Electrical Engineering from Clemson University and my bachelor's degree from the University of Georgia. During my studies, I collaborated with my advisor, Dr. Javad Velni, on research involving intelligent systems, integrating drone and ground vehicle platforms in collaborative settings. Although my focus has shifted from research to the aerospace industry, I remain dedicated to continuous learning and professional growth. For more details, please explore the sections below.

A drone acts as a central controller for a group of ground vehicles tracking a target.
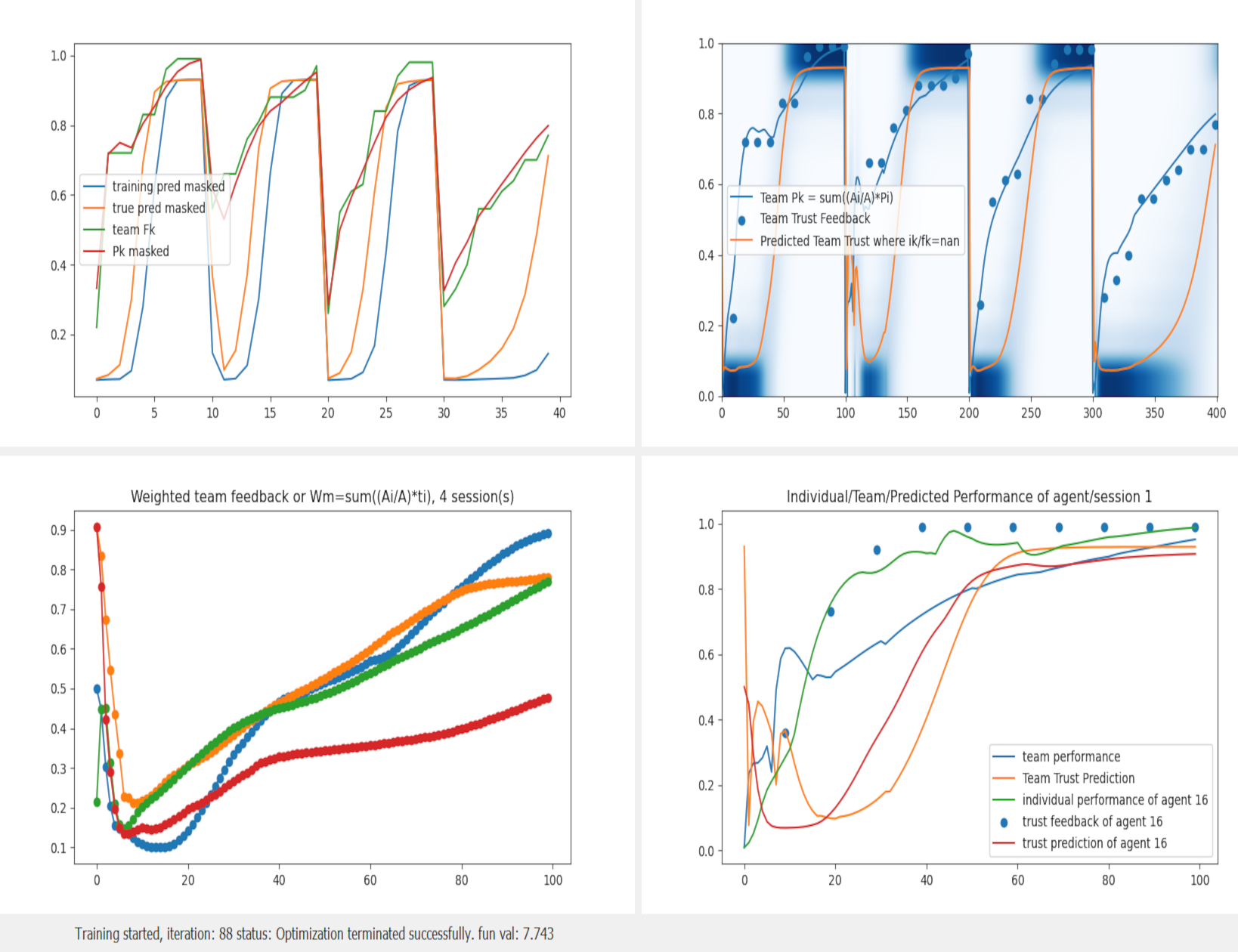
This publication expands upon a single agent model of trust called OPTIMo and applies it to a multi-agent scenario. Our model uses the single-agent model to properly distribute the workload of a coverage problem to then maximize the output of the multi-agent trust metric.

In this work we look to perform onboard image analysis to detect diseases by lowering a camera into the foilage of plants.

This was developed for a recent proposal for an agricultural project.

A simulation built in UNREAL Engine for collecting data for a targeting project.
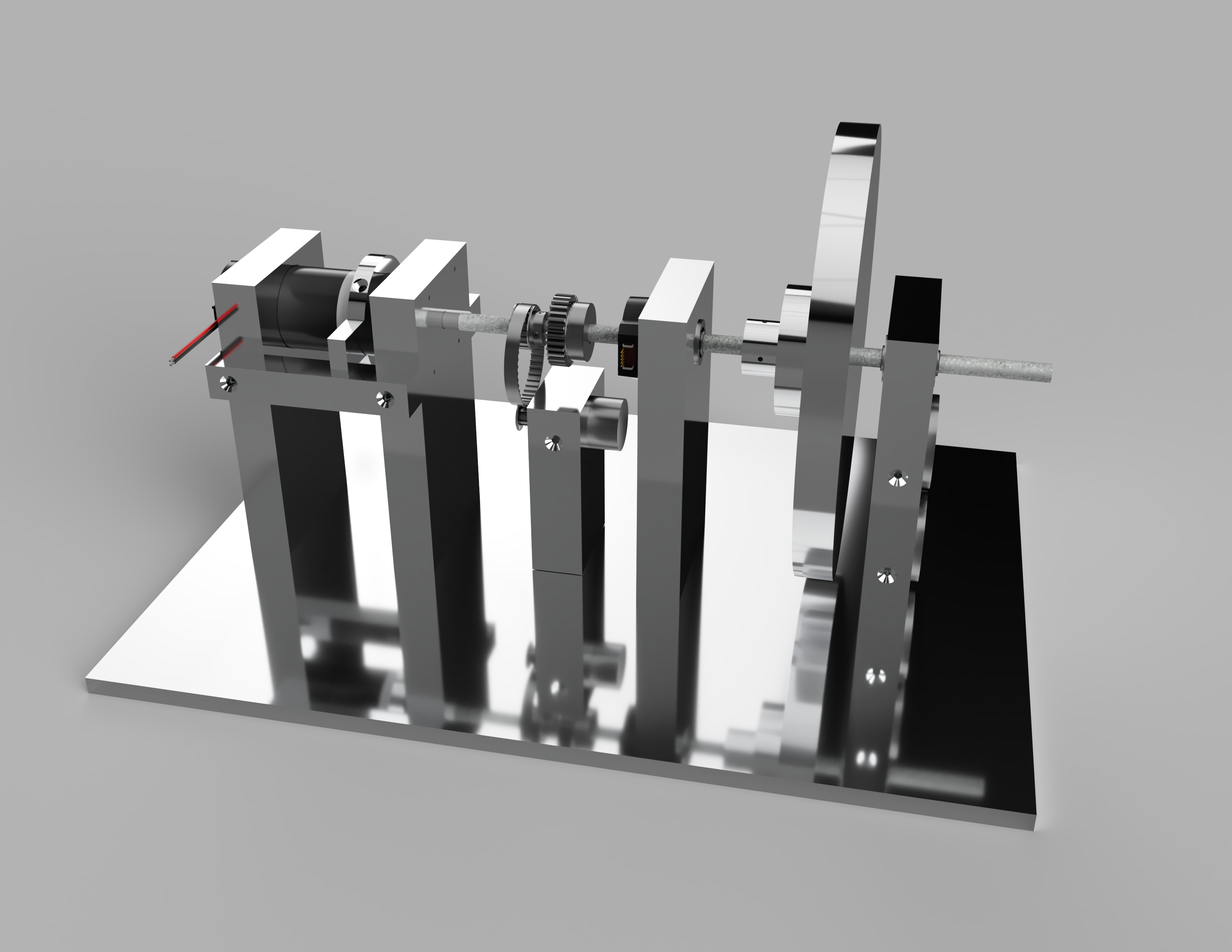
This was developed to aid in teaching a modern controls class.
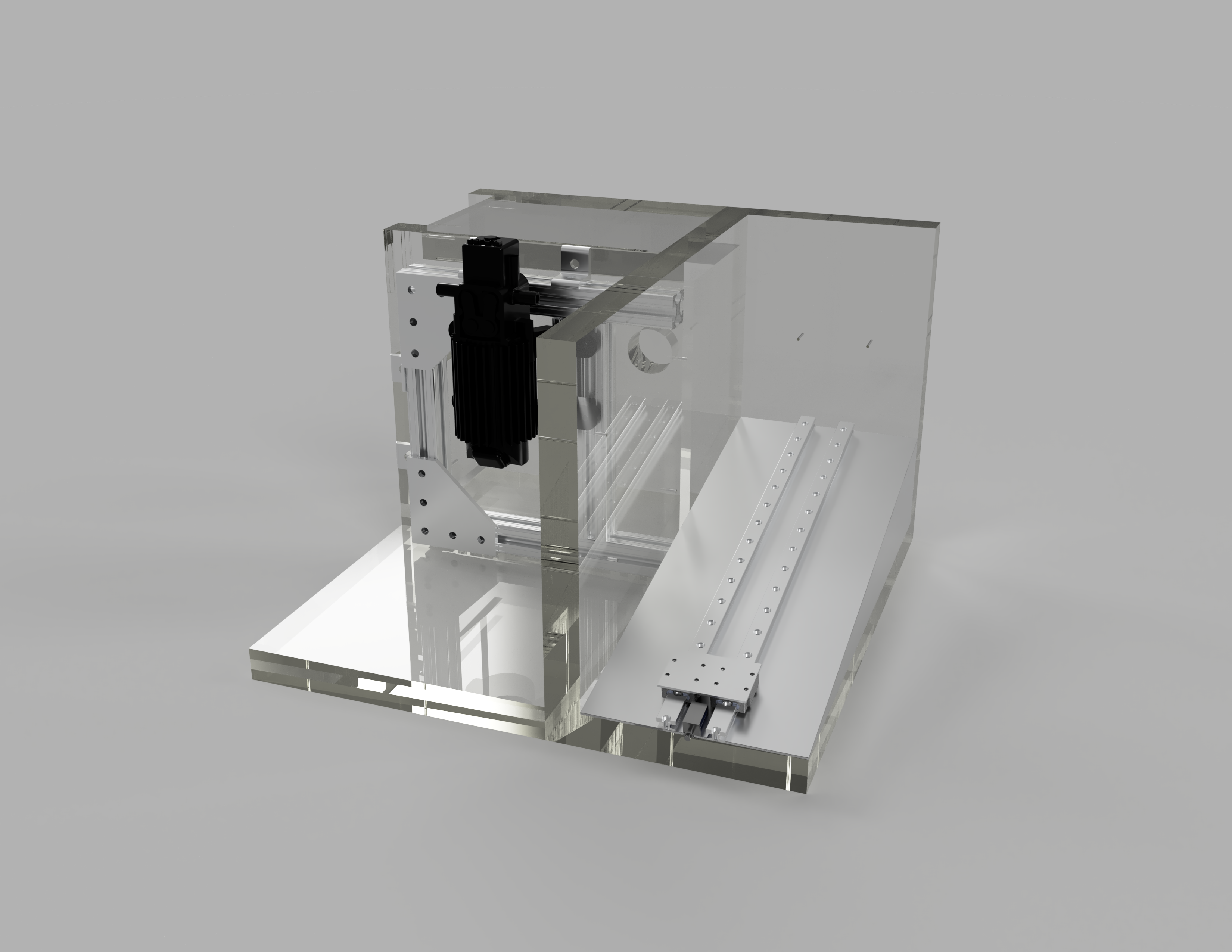
This was developed to aid in teaching a sensors and transducers class.
Master in Electrical Engineering with a focus on Intelligent Systems
Complex systems and controls Lab with Dr. Javad Velni
Aug 2022 - Dec 2023
Bachelors in Electrical Engineering
Certificate of Informatics
Jan 2018 - May 2022
These are some projects I work on my own time. Some were used for class projects and some are for no particular reason other than my own enjoyment.
This is an area I am interested in and therefore turned my curiosity into a class paper.

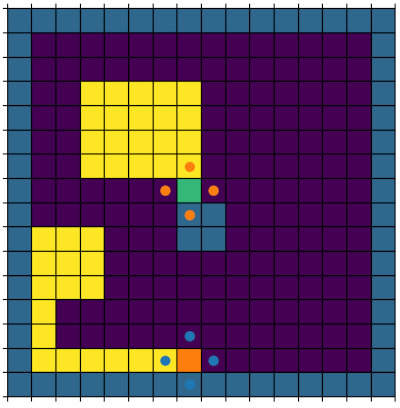
I have always wanted a roomba, so I built my own that is remote controlled and has sensors for autonomy. I wanted to implement another project where a simulation learned coverage control using reinforcement learning.
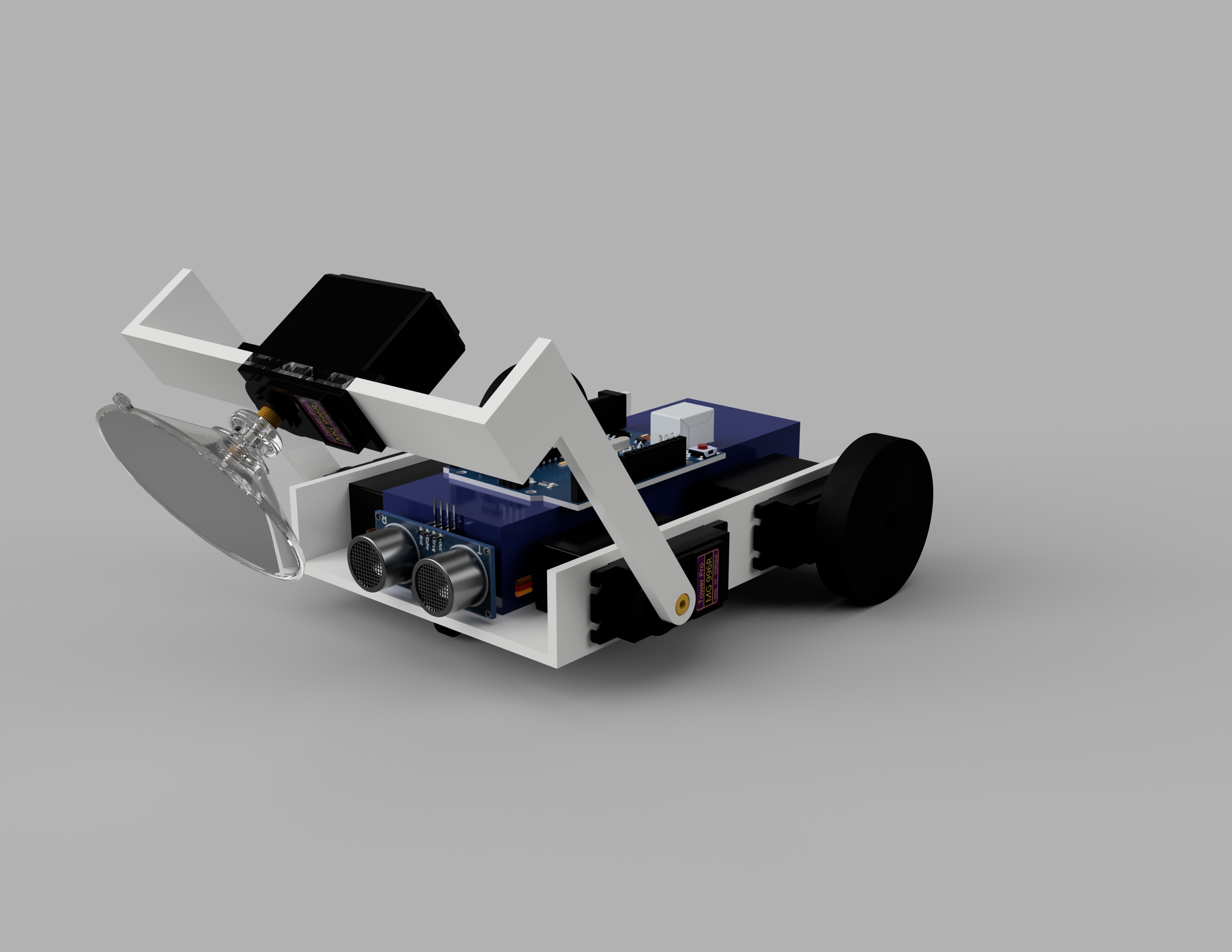
I wanted to test out a mechanical mechanism for suction, so I designed this robot to move plates around a table. Shoutout to Rocky and August for helping come up with this idea.
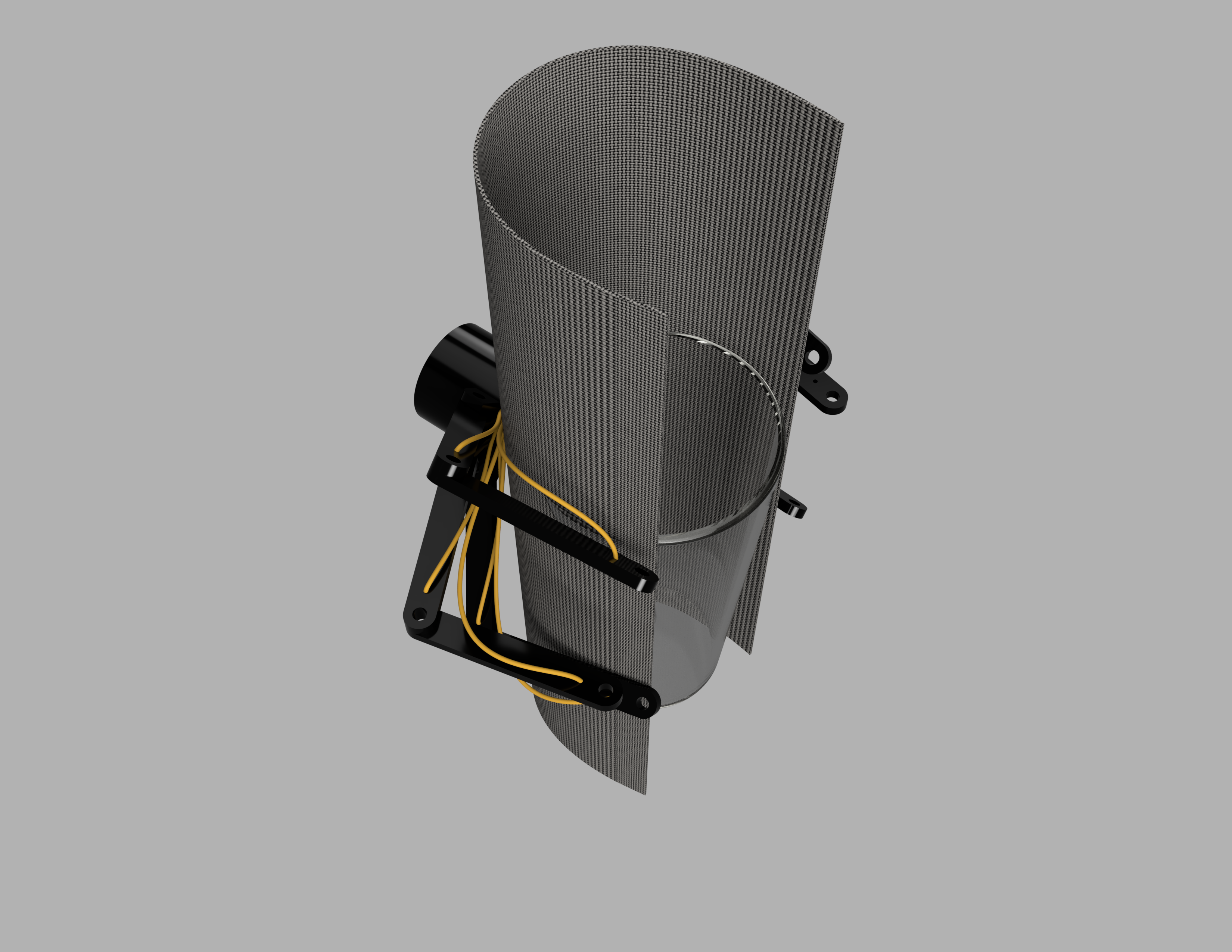
This robot helps you clean cups by clamping a rag around it. Shoutout to Shivani for helping come up with this idea.
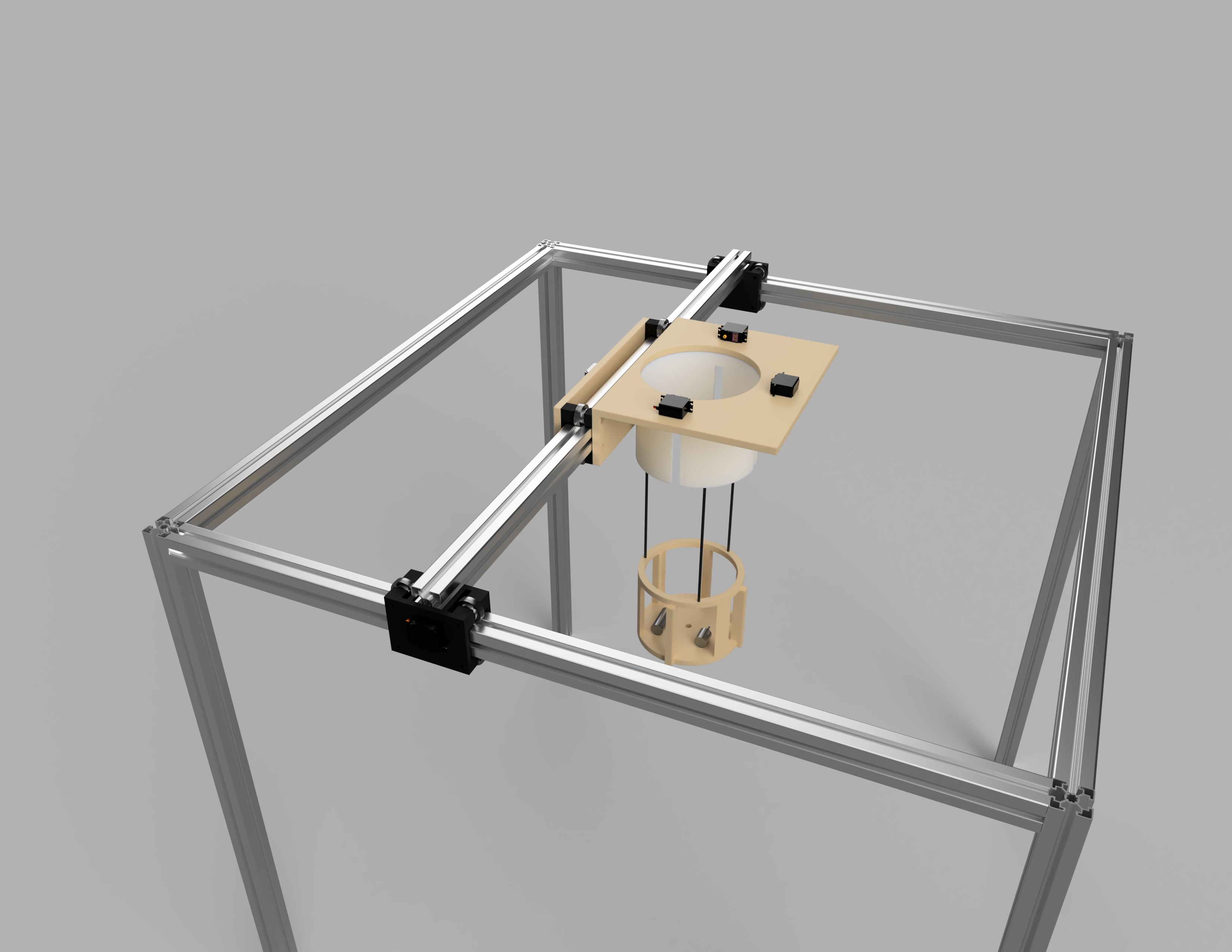
This robot can pick up canned food using Aruco tag for detecting the item and suction to move it to a designated place. Shoutout to Matt and Rocky for helping with this project.

This was our senior design capstone project. Information was originally posted at the link below, but it appears to no longer be active.
https://engineering.uga.edu/capstone-showcase-2022/design-and-construction-of-disassembly-station-for-the-uga-innovation-facto
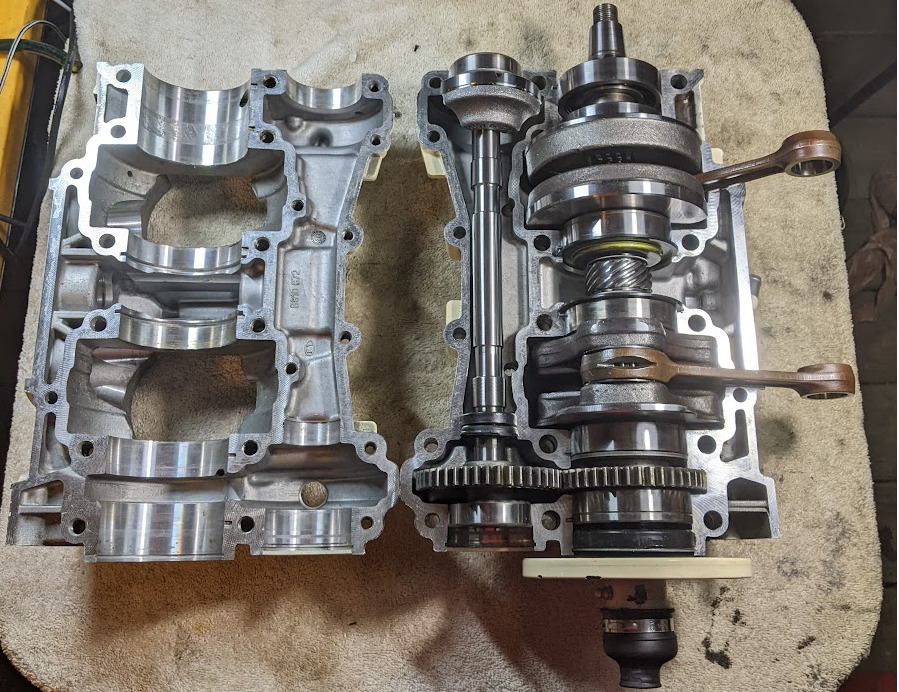
Some of my car/jetski restoration projects.